Raspberry Piを脳みそに、自走する機械を作った。
人間の顔を認識し、その顔に狙いを付け、
その後、顔の大きさが適切になるまで、前進/後進を行う。
OpenCVが動作しているので、非常に、極めて簡単にできた。
ちなみに、これが、Raspiで、OpenCVを試した日記
できあがりは、こんな感じ。
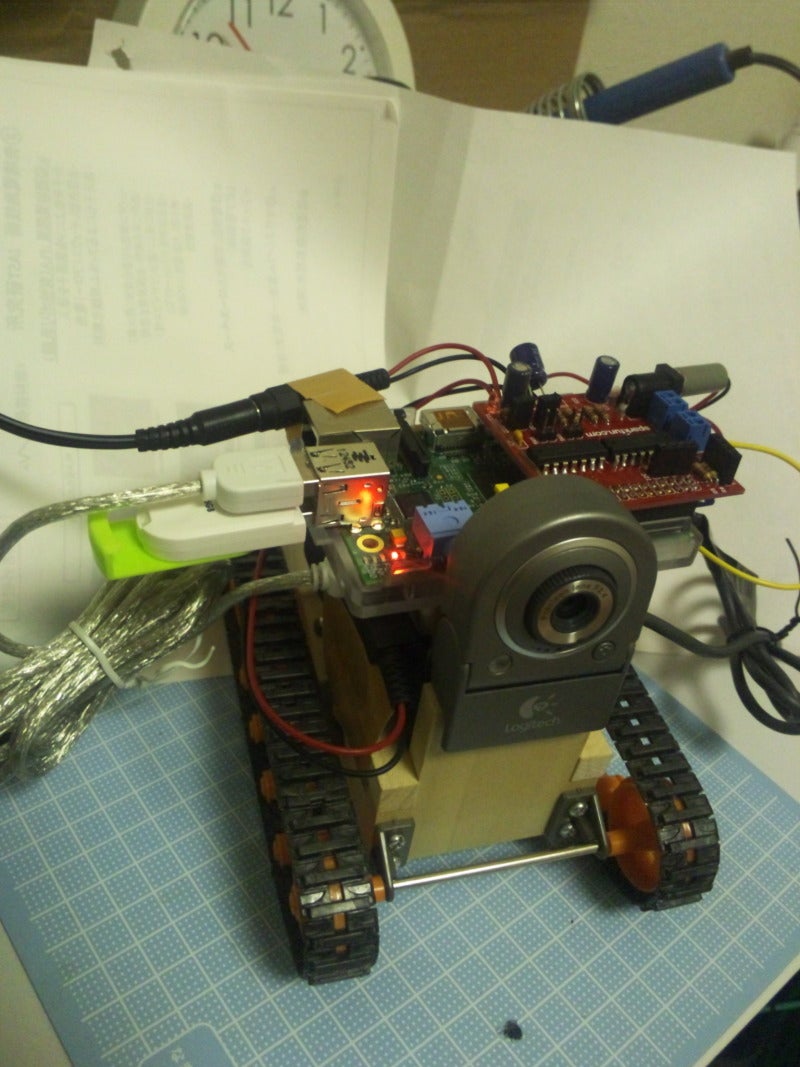
搭載してあるものは
- Raspi本体 (SDHCカード8GB挿入済み)
- モータ・ドライバ基板
- USB Webカメラ
- WiFIドングル(USB接続)
- 単三電池×4
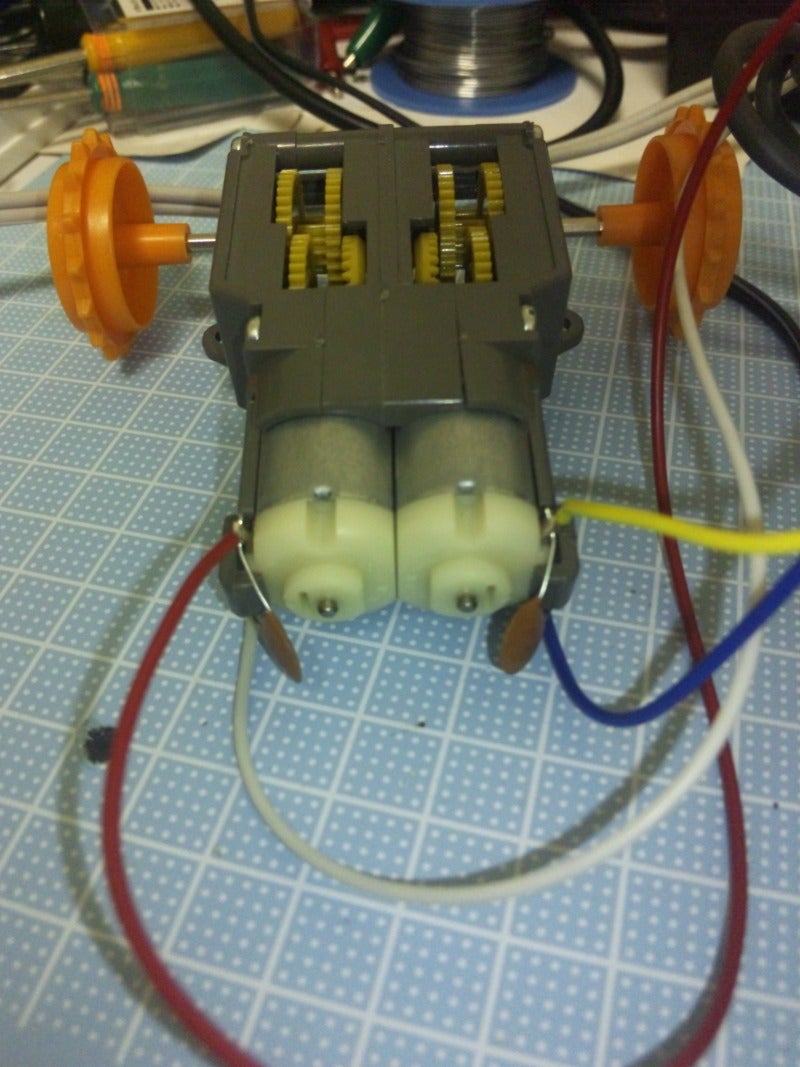
- DCモータ×2
ロジック回路の電源は、外部からケーブルで、5V を供給している。
ロジック回路の電源も、モータと同じ電池から、取ってもいいのだが…
現在は、電池の消耗具合が不明なので、とりあえず、外部電源。
土台になっている、シャーシは、タミヤの楽しい工作シリーズ No.104のブルドーザ。
ちなみに、このセットのリモコンは、バネの力で、中立に戻ったりして、なかなかいい感じだ。
僕が子供の時の、タミヤ製 1/35 タイガーI型のリモコンよりかなりいいぞ。

近頃は、ロボットを動かすのに、ステッピング・モータや、サーボ・モータを使う人が多いようだ。
しかし、あたしは、DCモータでやりたかった。
DCモータには、ノイズキラー・コンデンサを付ける。模型小僧の基本である。
DCモータ・ドライバの基板は、Raspi用に丁度いいものがあった。
https://www.sparkfun.com/products/11561
Sparkfun Electronics社の その名も「RaspiRobot Board, KIT-11561」!
「Raspiロボット・ボード」とは、よう言うたっ!!! (厚かましいぞwww)
スイッチサイエンスの通販で、¥3,294円。
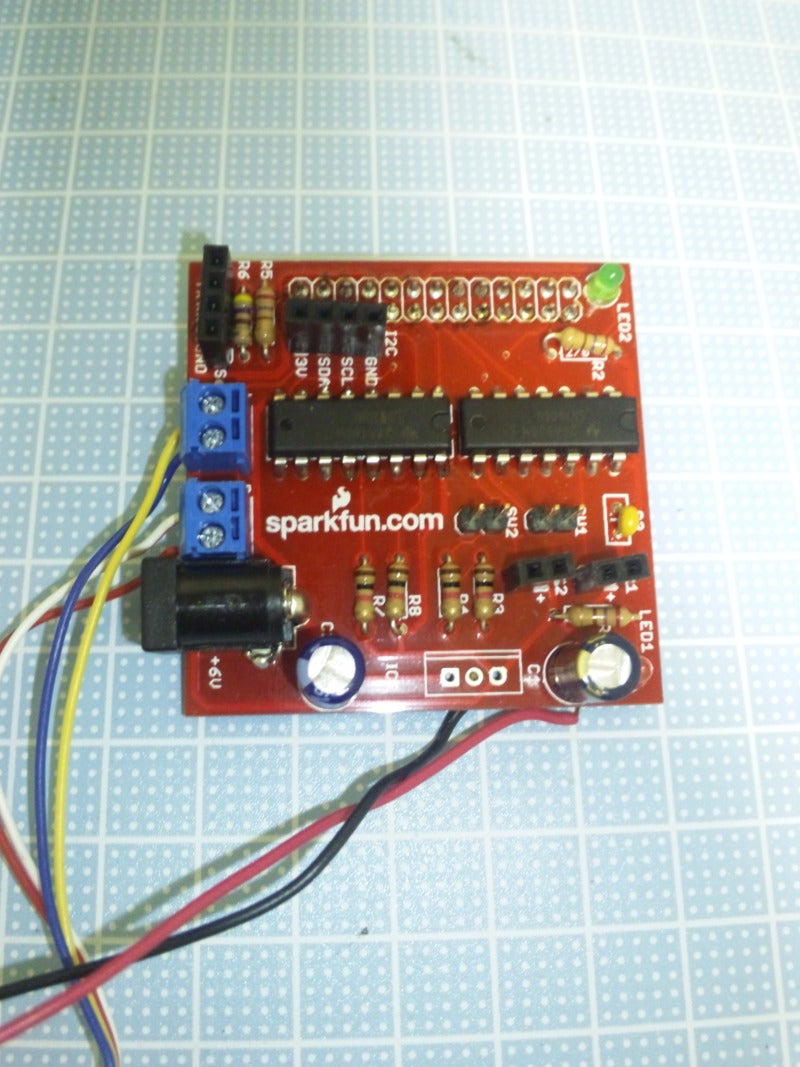
このボードは、
DCモータ・ドライバIC L293DNEと、7406(オープン・コレクタ高耐圧バッファ)を使用し、
Raspiの GPIO に7406やL293DNEを接続しているだけのシンプルで
オーソドックスな基板となっている。
諸元としては、
- 双方向モータ制御×2
- オープンコレクタ出力(7406)(25mA)×2
- LED×2
- スイッチ(デジタル)入力×2
- 5Vシリアル・コネクタ
- 3.3V I2Cコネクタ
- Python用ライブラリ有り
このロボット・ボードは、設計としては、電源として、6~10V程度を入力すると、レギュレータで電圧を降圧したのち、
Raspi本体にも電源供給をするようになっている。
しかし、本機のように、USBからの流れ出しが多いシステムでは、このボードのオマケの軟弱なレギュレータでは、
電流が足りない。
したがって、現在、僕は、3端子レギュレータは使用してない。
そして、モータ用の電源と、ロジックの電源を分けている。ロジック電源の方には、電解コンデンサを増量している。
どうも、Sparkfun社のボードは、電源回りの考えが変だ。
以前も、Arduino 用の USBホスト・シールド も、電源の取り回しで、細工をせざるを得なかった。
(この方のやりかたを、真似たのだった。)
電源以外は、まぁ、満足できるので、いいのだが。
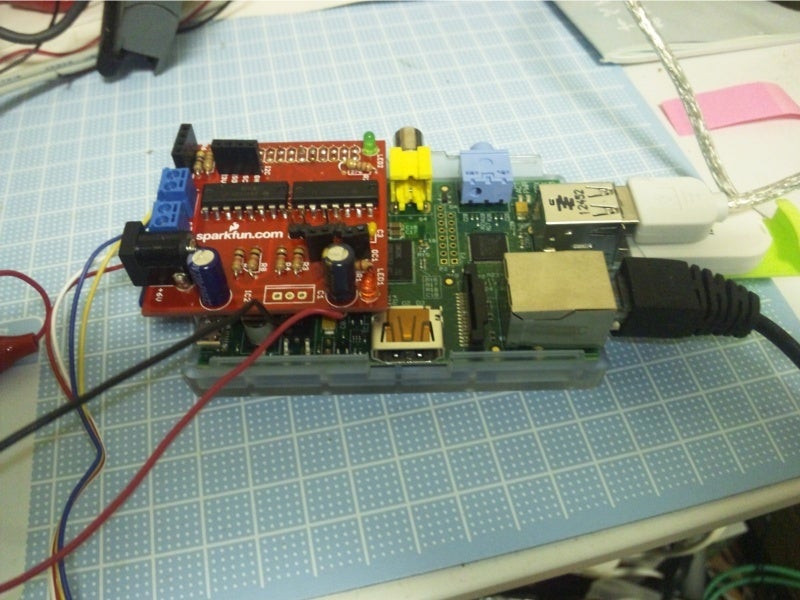
このボードを Raspi に装着すると、通常の Raspi のケースには入らない。
というか、割と嫌な感じではみ出す。まぁ、いいんだけど…
本システムの構成は、下図のとおり。

Raspi単体で、顔認識して、どう動くかを考え、モータも制御する。
認識結果の表示のためだけに、WiFi で、PCと通信し、
X protocol over ssh で、認識結果を PC上の X サーバに表示する。
結果表示が不要であれば、WiFiもPCも不要で、完全に単独で走行する。
ソフトウェアは、
人間の顔を見つけたら、
顔の位置が、認識対象の視野の中央に来るように、
右へ旋回/左へ旋回を決める。
顔の位置がセンターであれば、認識された顔の大きさをみて、
ちょうどいいサイズになるまで、前進/後進を行う。
カメラ入力の処理、顔認識、認識結果の表示は、すべてOpenCVの
機能を使用している。
極めて、簡単なソースコードでできている。
モータの制御は、ロボット・ボードのサンプルとして与えられた
プログラムを適当に変更している。
Raspiの GPIO のIOポートを、MMAPでユーザ空間に貼り付け、
メモリアクセスと同様に、IOポートをアクセスしている。
-- folow2.c
/* follow2
*/
#include "cv.h"
#include "highgui.h"
/*char* cascade = "/usr/share/opencv/haarcascades/haarcascade_frontalface_default.xml";*/
char* cascade = "/usr/local/opencv/share/OpenCV/haarcascades/haarcascade_frontalface_default.xml";
#define DISP_WIN "faceDetect"
void motor_drive(int cap_width,int last_face_x,int last_face_width);
extern void turn_right();
extern void turn_left();
extern void turn_stop();
extern void turn_stopNo();
extern void motor_gpio_init();
extern void go_forward();
extern void go_back();
CvSize minsiz ={0,0};
int last_face_x, last_face_width;
int cap_width=160;
int disp_and_sleepf=0;
int
main( int argc, char** argv )
{
int i;
double w = (double)cap_width;
double h = 120;
motor_gpio_init();
cvNamedWindow( DISP_WIN , CV_WINDOW_AUTOSIZE );
CvCapture* capture = NULL;
if (argc > 1){
disp_and_sleepf=1;
}else{
}
capture = cvCreateCameraCapture( 0 );
// (2)キャプチャサイズを設定する.
cvSetCaptureProperty (capture, CV_CAP_PROP_FRAME_WIDTH, w);
cvSetCaptureProperty (capture, CV_CAP_PROP_FRAME_HEIGHT, h);
IplImage* frame;
// 正面顔検出器の読み込み
CvHaarClassifierCascade* cvHCC = (CvHaarClassifierCascade*)cvLoad(cascade, NULL,NULL,NULL);
// 検出に必要なメモリストレージを用意する
CvMemStorage* cvMStr = cvCreateMemStorage(0);
// 検出情報を受け取るためのシーケンスを用意する
CvSeq* face;
while(1) {
frame = cvQueryFrame( capture );
if( !frame ) break;
// 画像中から検出対象の情報を取得する
face = cvHaarDetectObjects(frame, cvHCC, cvMStr,
1.2, 2, CV_HAAR_DO_CANNY_PRUNING,
minsiz, minsiz);
// 1.1, 3, 0, minsiz, minsiz);
//////cvHaarDetectObjects( //const CvArr* image,
for(i = 0; i < face->total; i++) {
// 検出情報から顔の位置情報を取得
CvRect* faceRect = (CvRect*)cvGetSeqElem(face, i);
// 取得した顔の位置情報に基づき、矩形描画を行う
cvRectangle(frame,
cvPoint(faceRect->x, faceRect->y),
cvPoint(faceRect->x + faceRect->width,
faceRect->y + faceRect->height),
CV_RGB(255, 0 ,0),
2, CV_AA, 0);
last_face_x=(int)faceRect->x;
last_face_width=(int)faceRect->width;
}
motor_drive(
(face->total <=0)? -1: cap_width,
last_face_x, last_face_width);
if(disp_and_sleepf){
cvShowImage( DISP_WIN, frame );
//char c = cvWaitKey(33);
char c = cvWaitKey(1);
if( c == 27 ) break;
}
}
// 用意したメモリストレージを解放
cvReleaseMemStorage(&cvMStr);
// カスケード識別器の解放
cvReleaseHaarClassifierCascade(&cvHCC);
cvReleaseCapture( &capture );
cvDestroyWindow( DISP_WIN );
}
#define HISTER 20
//#define HISTER 5
#define WANT_SIZE 40
#define SIZE_HISTER 5
//#define COUNT_SHIKII 30
#define COUNT_SHIKII 0
int turn_state =0;
int turn_count =0;
void
motor_drive(int cap_width,int last_face_x,int last_face_width)
{
int center = cap_width/2;
int face_x;
int new_state;
//test0();
face_x= last_face_x + (last_face_width/2);
printf(" size = %d \n", last_face_width);
/* centering */
if(cap_width <0){
/* stop (no face)*/
turn_state =0;
turn_stopNo();
return;
}else if(face_x < (center - HISTER)){
/* turn right (man view)*/
new_state =1;
turn_state =new_state;
turn_right();
return;
}else if(face_x > (center + HISTER)){
/* turn left (man view)*/
new_state =2;
turn_state =new_state;
turn_left();
return;
}
/* size */
if(last_face_width<(WANT_SIZE -SIZE_HISTER)){
go_forward();
return;
}
if(last_face_width>(WANT_SIZE +SIZE_HISTER)){
go_back();
return;
}
/* stop (man center & good size)*/
turn_state =0;
turn_stop();
return;
}
-- motor.c
//
// How to access GPIO registers from C-code on the Raspberry-Pi
// Example program
// 15-January-2012
// Dom and Gert
// Revised: 15-Feb-2013
// Access from ARM Running Linux
#define BCM2708_PERI_BASE 0x20000000
#define GPIO_BASE (BCM2708_PERI_BASE + 0x200000) /* GPIO controller */
#include
#include
#include
#include
#include
#define PAGE_SIZE (4*1024)
#define BLOCK_SIZE (4*1024)
int mem_fd;
void *gpio_map;
// I/O access
volatile unsigned *gpio;
// GPIO setup macros. Always use INP_GPIO(x) before using OUT_GPIO(x) or SET_GPIO_ALT(x,y)
#define INP_GPIO(g) *(gpio+((g)/10)) &= ~(7<<(((g)%10)*3))
#define OUT_GPIO(g) *(gpio+((g)/10)) |= (1<<(((g)%10)*3))
#define SET_GPIO_ALT(g,a) *(gpio+(((g)/10))) |= (((a)<=3?(a)+4:(a)==4?3:2)<<(((g)%10)*3))
#define GPIO_SET *(gpio+7) // sets bits which are 1 ignores bits which are 0
#define GPIO_CLR *(gpio+10) // clears bits which are 1 ignores bits which are 0
#define SET_OUT_MODE(g) { INP_GPIO(g); OUT_GPIO(g);}
void setup_io();
void turn_right();
void turn_left();
void turn_stop();
void motor_gpio_init();
void init_sign_led();
void led1(int);
void led2(int);
// Set GPIO pins 7-11 to output
//int main(int argc, char **argv)
void
motor_gpio_init()
{
int g;
// Set up gpi pointer for direct register access
setup_io();
// Switch GPIO 7..11 to output mode
/************************************************************************\
* You are about to change the GPIO settings of your computer. *
* Mess this up and it will stop working! *
* It might be a good idea to 'sync' before running this program *
* so at least you still have your code changes written to the SD-card! *
\************************************************************************/
// Set GPIO pins 7,8,21,22, 17,4,25 to output
SET_OUT_MODE(7); // LED1
SET_OUT_MODE(8); // LED2
SET_OUT_MODE(21); //OC output
SET_OUT_MODE(22);
SET_OUT_MODE(17); //Motor
SET_OUT_MODE(4);
SET_OUT_MODE(10);
SET_OUT_MODE(25);
GPIO_CLR = 1<<(17); // 1-2EN OFF
GPIO_CLR = 1<<(10); // 3-4EN OFF
GPIO_CLR = 1<<(4); // 1A OFF
GPIO_CLR = 1<<(25); // 3A OFF
init_sign_led();
return ;
}
void
init_sign_led()
{int i;
for(i=0;i<3;i++){
led1(1);led2(1);
sleep(1);
led1(0);led2(0);
sleep(1);
}
}
void
test0()
{
int g,rep;
GPIO_CLR = 1<<(10); // 3-4EN OFF
GPIO_SET = 1<<(17); // 1-2EN ON
GPIO_SET = 1<<7; //LED1
GPIO_SET = 1<<(4); // 1A ON
sleep(3);
GPIO_CLR = 1<<7; //LED1 OFF
GPIO_CLR = 1<<(4); // 1A OFF
sleep(3);
/*--*/
GPIO_CLR = 1<<(17); // 1-2EN OFF
GPIO_SET = 1<<(10); // 3-4EN ON
GPIO_SET = 1<<8; //LED2
GPIO_SET = 1<<(25); // 3A ON
sleep(3);
GPIO_CLR = 1<<8; //LED2 OFF
GPIO_CLR = 1<<(25); // 3A OFF
sleep(3);
}
void
test1()
{
int g,rep;
for(rep=0; rep<10; rep++) {
test0();
}
return ;
}
#define MOTOR_ON_TIME 30000
void
go_forward()
{
printf("forward()\n");
GPIO_SET = 1<<7; //LED1
GPIO_SET = 1<<8; //LED2
GPIO_CLR = 1<<(17); // 1-2EN OFF
GPIO_CLR = 1<<(10); // 3-4EN OFF
GPIO_CLR = 1<<(4); // 1A OFF
GPIO_CLR = 1<<(25); // 3A OFF
GPIO_SET = 1<<(17); // 1-2EN ON
GPIO_SET = 1<<(10); // 3-4EN ON
usleep(MOTOR_ON_TIME);
GPIO_CLR = 1<<(17); // 1-2EN OFF
GPIO_CLR = 1<<(10); // 3-4EN OFF
}
void
go_back()
{
printf("back()\n");
GPIO_SET = 1<<7; //LED1
GPIO_SET = 1<<8; //LED2
GPIO_CLR = 1<<(17); // 1-2EN OFF
GPIO_CLR = 1<<(10); // 3-4EN OFF
GPIO_SET = 1<<(4); // 1A ON
GPIO_SET = 1<<(25); // 3A ON
GPIO_SET = 1<<(17); // 1-2EN ON
GPIO_SET = 1<<(10); // 3-4EN ON
usleep(MOTOR_ON_TIME);
GPIO_CLR = 1<<(17); // 1-2EN OFF
GPIO_CLR = 1<<(10); // 3-4EN OFF
}
void
turn_right()
{
printf("turn_right()\n");
GPIO_SET = 1<<7; //LED1
GPIO_CLR = 1<<8; //LED2
GPIO_CLR = 1<<(17); // 1-2EN OFF
GPIO_CLR = 1<<(10); // 3-4EN OFF
GPIO_SET = 1<<(4); // 1A ON
GPIO_CLR = 1<<(25); // 3A OFF
GPIO_SET = 1<<(17); // 1-2EN ON
GPIO_SET = 1<<(10); // 3-4EN ON
usleep(MOTOR_ON_TIME);
GPIO_CLR = 1<<(17); // 1-2EN OFF
GPIO_CLR = 1<<(10); // 3-4EN OFF
}
void
turn_left()
{
printf("turn_left()\n");
GPIO_CLR = 1<<7; //LED1
GPIO_SET = 1<<8; //LED2
GPIO_CLR = 1<<(17); // 1-2EN OFF
GPIO_CLR = 1<<(10); // 3-4EN OFF
GPIO_CLR = 1<<(4); // 1A OFF
GPIO_SET = 1<<(25); // 3A ON
GPIO_SET = 1<<(17); // 1-2EN ON
GPIO_SET = 1<<(10); // 3-4EN ON
usleep(MOTOR_ON_TIME);
GPIO_CLR = 1<<(17); // 1-2EN OFF
GPIO_CLR = 1<<(10); // 3-4EN OFF
}
void
turn_stop()
{
printf("turn_stop()\n");
GPIO_SET = 1<<7; //LED1
GPIO_SET = 1<<8; //LED2
GPIO_CLR = 1<<(17); // 1-2EN OFF
GPIO_CLR = 1<<(10); // 3-4EN OFF
}
void
turn_stopNo()
{
printf("turn_stop()\n");
GPIO_CLR = 1<<7; //LED1
GPIO_CLR = 1<<8; //LED2
GPIO_CLR = 1<<(17); // 1-2EN OFF
GPIO_CLR = 1<<(10); // 3-4EN OFF
}
void
led1(int x)
{
if(x){
GPIO_SET = 1 <<7; //LED1
}else{
GPIO_CLR = 1 <<7; //LED1
}
}
void
led2(int x)
{
if(x){
GPIO_SET = 1 <<8; //LED2
}else{
GPIO_CLR = 1 <<8; //LED2
}
}
//
// Set up a memory regions to access GPIO
//
void setup_io()
{
/* open /dev/mem */
if ((mem_fd = open("/dev/mem", O_RDWR|O_SYNC) ) < 0) {
printf("can't open /dev/mem \n");
exit(-1);
}
/* mmap GPIO */
gpio_map = mmap(
NULL, //Any adddress in our space will do
BLOCK_SIZE, //Map length
PROT_READ|PROT_WRITE,// Enable reading & writting to mapped memory
MAP_SHARED, //Shared with other processes
mem_fd, //File to map
GPIO_BASE //Offset to GPIO peripheral
);
close(mem_fd); //No need to keep mem_fd open after mmap
if (gpio_map == MAP_FAILED) {
printf("mmap error %d\n", (int)gpio_map);//errno also set!
exit(-1);
}
// Always use volatile pointer!
gpio = (volatile unsigned *)gpio_map;
} // setup_io
-- Makefile
ALL= follow follow2
CXX = g++
# package openCV
LDFLAGS = -lopencv_legacy -lopencv_highgui -lopencv_core -lopencv_ml -lopencv_video -lopencv_imgproc -lopencv_calib3d -lopencv_objdetect -L/usr/lib
CPPFLAGS = -mfpu=vfpv3 -O4 -I/usr/include/opencv -I/usr/include/opencv2
##CPPFLAGS = -g -I/usr/include/opencv -I/usr/include/opencv2
all: $(ALL)
follow2 : follow2.o motor.o
$(CXX) -o $@ $< $(LDFLAGS) motor.o
follow2.o : follow2.c
$(CXX) -c $< $(CPPFLAGS)
follow : follow.o motor.o
$(CXX) -o $@ $< $(LDFLAGS) motor.o
follow.o : follow.c
$(CXX) -c $< $(CPPFLAGS)
motor.o : motor.c
$(CXX) -c $< $(CPPFLAGS)
clean:
rm -f $(ALL) *.o